Questa è la seconda parte di una serie di articoli dedicata ai filtri digitali. Prima parte: Introduzione ai filtri digitali e confronto con i filtri analogici.
La risposta nel tempo ad un ingresso costante di un filtro passa-basso analogico, è tipicamente quella illustrata in figura:

Come si può vedere, essa è costituita da un transitorio iniziale di tipo oscillatorio che si smorza a regime ed è dovuto all’azione del condensatore.
Questo transitorio, dunque, è una caratteristica distintiva del filtro. Vediamo cosa succede quando il ritardo dovuto al transitorio è comparabile con i tempi di variazione del segnale di ingresso. Supponiamo di avere un filtro passa-basso passivo del tipo:

in cui assumiamo R=100 kΩ e C=10 nF; ne segue una costante di tempo τ=10-3 s.
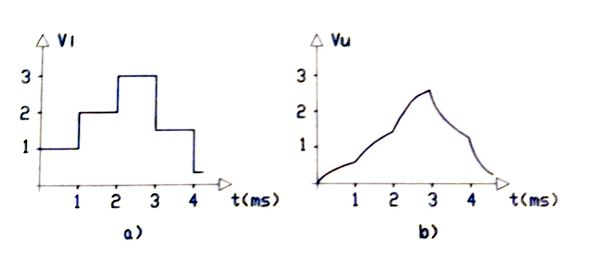
All’ingresso del filtro poniamo un segnale di tipo numerico, vedi figura 3a, con quanto temporale T=1 ms, ovvero pari alla costante di tempo del filtro. Assumendo il condensatore inizialmente scarico, durante il primo periodo dell’ingresso esso comincerà a caricarsi esponenzialmente verso la tensione di 1 V. Dalla teoria è noto che dopo una costante di tempo, ovvero 1 ms, il condensatore avrà raggiunto il 63% del valore finale, ovvero 0,63 V.
Dopo 1 ms tuttavia, l’ingresso si porta ad un valore pari a 2 V: il condensatore allora, che è carico a 0,63 V, si caricherà adesso verso una tensione pari a: (2 – 0,63)= 1,37 V. Dunque dopo un’altro millisecondo il condensatore sarà carico a una tensione pari a Vu=0,63 + (0,63×1,37) V = 1,49 V
Iterando questi calcoli, si trova che la tensione di uscita del filtro segue l’andamento di figura 3-b. L’effetto del filtro è quello di smussare gli spigoli della forma d’onda di ingresso: più precisamente, il filtro ne opera la media mobile (moving average).
Media mobile
Semplicemente, la media mobile (pesata) di una serie di valori discreti, si può esprimere come:

dove abbiamo assunto, ad esempio, 3 valori. La somma dei coefficienti deve essere:

Modello matematico di un filtro digitale FIR
Generalizzando quanto detto precedentemente, l’uscita di un filtro digitale FIR si ottiene dalla convoluzione discreta tra il segnale x(nT) e la distribuzione dei coefficienti ai con quanto temporale T=1. Potremmo dimostrare, infatti, che tale convoluzione discreta equivale ad una operazione di filtraggio nel dominio del tempo.

Scrivendo per esteso l’equazione alle differenze finite precedente, possiamo dire che l’uscita di un filtro FIR di ordine N nell’istante n, può essere scritta come:

L’uscita in un certo istante è data dunque dalla combinazione lineare dei campioni dell’ingresso presi in un numero finito di istanti precedenti con determinati coefficienti, ottenuti ponendo in ingresso del filtro degli impulsi unitari nei diversi istanti. Per questo motivo, questo tipo di filtro digitale viene chiamato risposta finita all’impulso (FIR: Finite Impulse Response).
Commento finale
Il comportamento di un filtro può essere studiato più comodamente in frequenza analizzando la sua funzione di trasferimento. Lo vedremo nella prossima parte di questa serie di articoli.