
(Electronic) systems are the physical interconnection of components or parts that organically collect some information and process it. This collection takes place with the help of input devices (sensors), which respond in some way to this information using electricity. These signals in turn can be processed to constitute an output action to control a physical process. If the signals at stake are electrical and the devices are electronic in nature, we are talking about electronic control systems.
Electronic control systems can also be considered as a process that transforms one signal into another in order to provide the desired response of the system. So we can say that a simple electronic control system consists of an input (signal), a process and an output (signal).
There are many ways to represent a system, for example: mathematically, descriptively, pictorially, or schematically. Electronic systems are generally represented schematically as a series of blocks and signals interconnected with each block and with their own set of inputs and outputs.
As a result, even the most complex of electronic control systems can be represented by a combination of simple blocks, with each block representing a single component or a complete subsystem. The representation of an electronic system with a number of interconnected blocks or boxes is commonly known as “block diagram representation”.

Electronic systems have both inputs and outputs: the output or outputs are generated by processing the inputs. These outputs produce a “change” in the behavior of the controlled system. The inputs of a system are therefore the “causes” of this change, while the resulting action that translates on the output is called the “effect”.
In other words, an electronic system can be classified as “causal”, as there is a direct cause-and-effect relationship between its input and its output. The analysis of electronic systems and the theory of process control are generally based on this cause and effect analysis.
For example, in an audio system, a microphone (input device) causes sound waves to be converted into electrical signals for amplification (a process), and a speaker (output device) produces sound waves as an effect of being driven by the amplifier’s electrical signals.
But an electronic system does not have to be a simple or single operation. It can also be an interconnection of different subsystems that all work together within the same general system. Our sound system could, for example, involve connecting a CD player, DVD player, MP3 player or radio receiver which are all multiple inputs to the same amplifier that in turn drives one or more sets of surround speakers.
An electronic system cannot therefore be just a collection of inputs and outputs, it must “do something”, even if this something was just turning on a light. We know that sensors are input devices that detect or transform real-world measurements into electrical signals that can then be processed. These electrical signals can be voltages or currents within a circuit. The output device is called an actuator, as it converts the processed signal into some operation or action, generally in the form of mechanical movement.
Types of electronic control systems
Electronic systems operate on continuous time signals (CT) or discrete time signals (DT). A continuous-time system is one in which input signals are defined along a continuum of time, as an analog signal that “continues” over time producing a continuous-time signal.

But a continuous-time signal can also vary in amplitude or be periodic in nature with a certain period of time T. As a result, continuous-time electronic systems tend to be purely analog systems that produce a linear operation on both their signals, input and output, referring to a certain period of time.
For example, the temperature of a room can be seen as a continuous signal. We can represent a continuous signal over time using t as an independent variable and x(t) and y(t) as input and output signals as t changes.
Generally, most signals in the physical world tend to be continuous-time signals. For example, voltage, current, temperature, pressure, speed, etc.
On the other hand, a discrete-time system is one in which the input signals are not continuous but a sequence or series of signal values defined at “discrete” points of time. This results in a discrete-time output generally represented as a sequence of values or numbers.
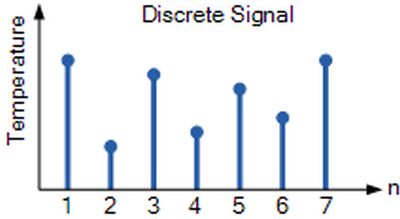
Generally, a discrete signal is specified only at intervals, values, or points equidistant over time. So, for example, the temperature of a room measured at 13:00, 14:00, 15:00 and again at 16:00, without recording the actual temperature of the room in the range between these values such as, for example, 13:30 or 14:45.
However, a continuous-time signal, x(t) can be represented as a discrete set of values over discrete intervals or “moments in time”. Discrete signals are not measured with respect to time, but are instead plotted at discrete time intervals, where n is the sampling interval (so n=1,2,3..). As a result, discrete-time signals are generally referred to as x(n) representing the input and y(n) representing the output.

Interconnection of systems
One of the practical aspects of the representation of block schema systems is that they can be combined together in series or in parallel to form larger and more complex systems. Many real systems are built using the interconnection of different subsystems; using block diagrams to represent each subsystem we can construct a graphical representation of the entire system analyzed.
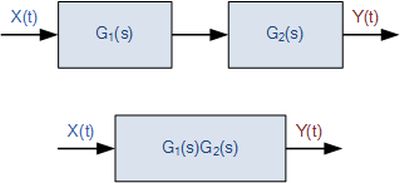
In a series-connected continuous-time system, the output signal y(t) of the first subsystem, “A” becomes the input signal of the second subsystem “B” whose output becomes the input of the third subsystem, “C” and so on through the chain of the series giving A x B x C, etc.
Then the original input signal is cascaded through a cascaded system. In the case of two series-connected subsystems, the equivalent output will be equal to the multiplication of systems, i.e. y(t) = [G1(s) x G2(s)] x x(t), where G1 and G2 represent the subsystem transfer functions and G = G1(s) x G2(s) represents the equivalent system transfer function.
The term “Transfer function” of a system is defined as the mathematical relationship between output and system input, i.e. output/input, and then describes the behavior of the system.
In addition, for a system connected in series, the order in which a series operation is performed does not matter for the input and output signals because: G1(s) x G2(s) is equal to G2(s) x G1(s). An example of a simple series connected system could be a single microphone that powers an amplifier followed by a speaker.
Parallel connection
In a parallel connected continuous-time system, each subsystem receives the same input signal and their individual outputs are added together to produce an overall output, y(t). Thus, for two parallel connected subsystems, the equivalent single output will be the sum of the two individual inputs, i.e. y(t) = [G1(s) + G2(s)] x x(t).

An example of a simple parallel connected system could be several microphones connected to a mixer that in turn powers an amplifier and speaker system.
Feedback systems
Another important interconnection of systems widely used in control systems is the “feedback configuration”. In feedback systems, a fraction of the output signal is “retransmitted” and added or subtracted from the original input signal. The result is that the output of the system continuously alters or updates its inputs in order to modify the response of a system to improve its stability. A feedback system is also commonly called the “Closed Loop System”, as shown in the figure.
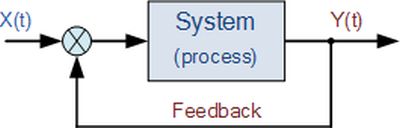
Closed loop feedback system
Feedback systems are used in most practical electronic system designs to help stabilize the system and increase its control. If the feedback loop reduces the value of the original signal, the feedback loop is known as “negative feedback”. If the feedback loop increases the value of the original signal, the feedback loop is known as “positive feedback”.
An example of a simple system with feedback could be a home heating system controlled by a thermostat. If the house is too hot, the feedback loop switches the heating system to “OFF” to make the house colder. If the house is too cold, the feedback loop switches the heating system to “ON” to make the house warmer. In this case, the system includes the heating system, the air temperature and the thermostatically controlled feedback circuit.
Summary of electronic control systems
We have seen that a simple electronic system consists of an input, a process, an output and very often a link with feedback. Electronic systems can be represented using interconnected block diagrams in which the lines between each block or subsystem represent both the flow and direction of a signal through the system.
Block diagrams do not necessarily have to represent a single simple system but can represent very complex systems made by many interconnected subsystems. These subsystems can be connected together in series, in parallel, or in combination of both depending on the flow of signals.
We’ve also seen that signals and electronic systems can be continuous-time or discrete-time and can be analog, digital, or both. Feedback loops can be used to increase or reduce the performance of a particular system by providing better stability and control. Control is the process that aims to “control” a system variable, that is, to bring it to a certain value, called a reference value.


